
![]()

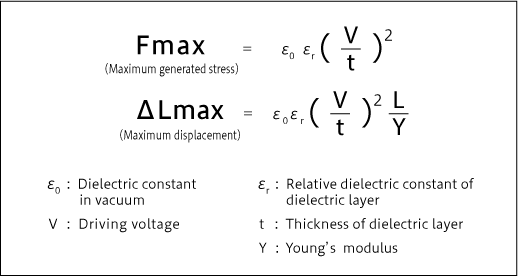
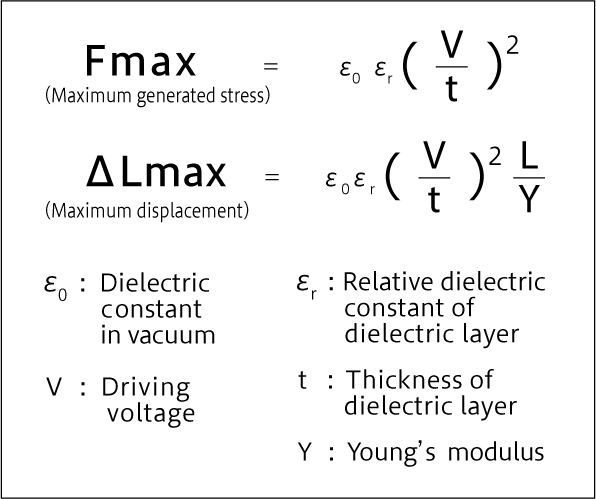
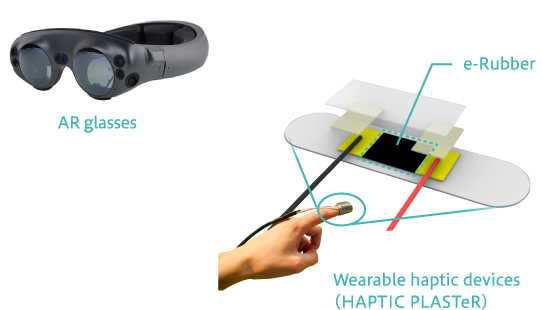
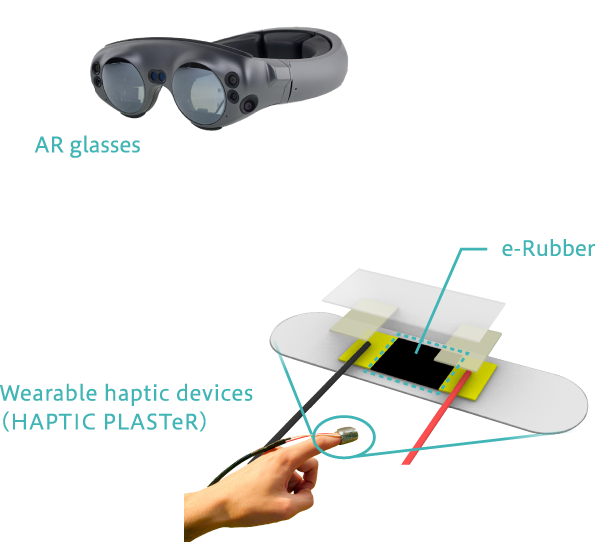
e-Rubber is a novel rubber material that can function either as an actuator in response to electrical stimuli, or as a sensor in response to mechanical force. Its basic structure is a thin dielectric elastomer film sandwiched between two electrodes.
Actuator (motive power source)
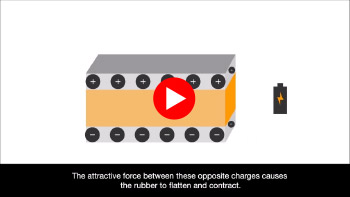
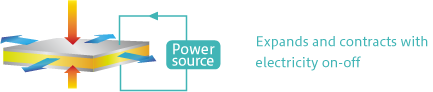
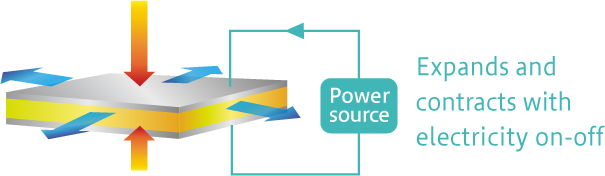
Electricity is transformed into mechanical force
Example of use in commercial product
● Lightweight
● Silent
(moves without sound)
● Large displacement
● Quick movement
● Softness
(gentle movement)
● Low energy use
(does not generate heat)
Sensor
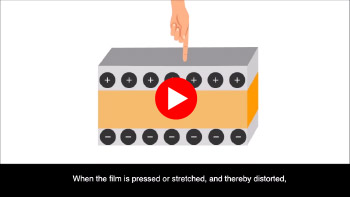

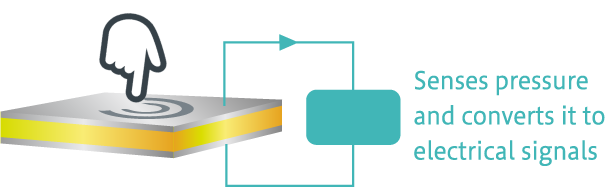
Transforms mechanical force into electricity
Example as pressure sensor
● Thin
● Soft
● Can sense minute loads
● Lightweight
● Wide sensing range
● Tough
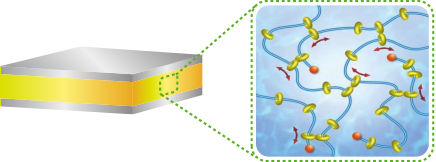
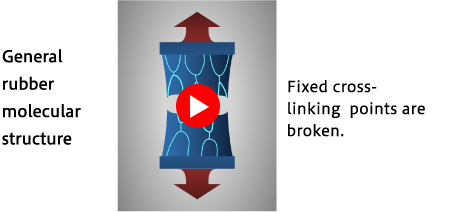
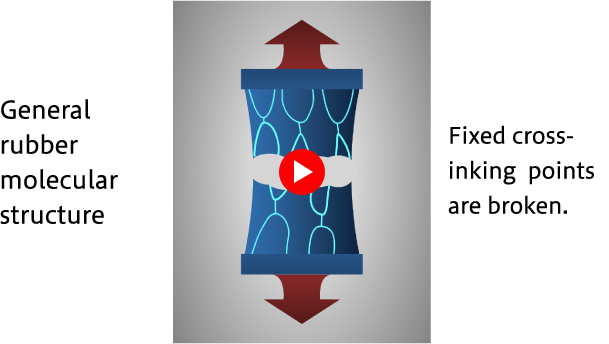
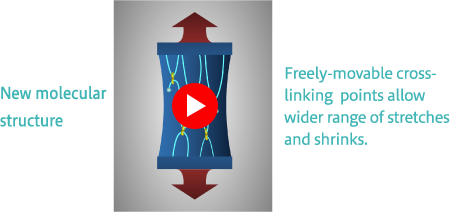
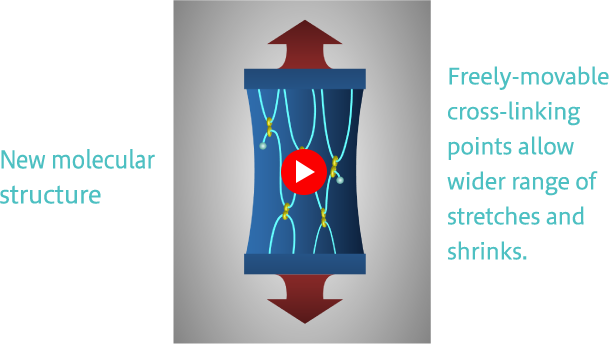
These new materials are characterized by freely-movable cross-links on chains in polymer networks. In general polymeric materials with fixed cross-links, the inhomogeneous distribution of cross-links in the polymer network means that when the material is stretched or pulled tension is concentrated on shorter chains, which then tend to break. With freely movable cross-links, the movement of the cross-links allows the tension to become more homogeneous.
This is achieved with a new molecular structure, consisting of linear polymers (polyethyleneglycol) with cyclic molecules (cyclodextrin) around them like beads on a string and stopper molecules (adamantane) at each end. The rings form double-loop cross links with rings on other polymer chains, which then act like pulleys on which the polymer strands move to homogenize the structure.
Extra length between the final cross-links and stoppers on the ends of the chains also provide room for extra movement. Slide-ring materials also show excellent restoration properties.









Ex:
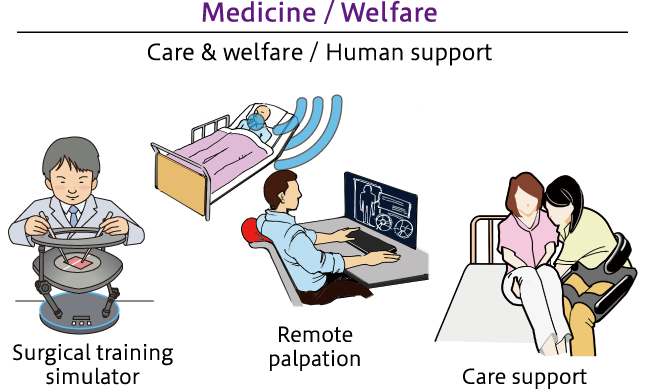
Individual suture training with reproduction of stressful movements
Ex:
Team role playing of how to respond when conditions change
Ex:
↓


Toyoda Gosei has developed a “tactile hand” that can sense the shape and hardness of objects using soft and lightweight e-Rubber sensors. This is something robots have not been able to do up to this time.
This tactile hand is being used together with robot systems from QBIT Robotics to enable robots to perform more human-like work.
Our aim is for the spread of practical robots that will be beneficial in future aging societies.
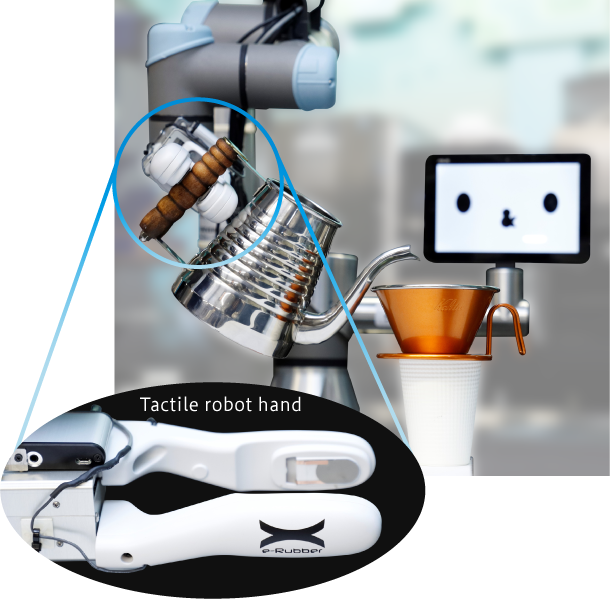
With e-Rubber sensors on their fingers, these robot hands possess a “sense of touch” and can perform work in a more human-like way with the ability to sense the shape and softness of objects, an ability that conventional robots have lacked. Highly accurate e-Rubber sensors enable just one hand to handle various objects, whether they are heavy, light (less than 100 grams), or soft.
Aging societies with fewer children are rapidly expanding in many advanced countries, and one of the serious social issues is a labor shortage in manufacturing, service, social-welfare and many other fields. Robots that perform work on behalf of humans hold much promise. Toyoda Gosei is collaborating with QBIT Robotics, a startup that develops systems centered on collaborative robots that work together with humans for use in the service industry, including food service and entertainment. The two companies aim to develop practical robots that can be used for support in aging societies with fewer children.

